概要
陸・海・空だけでなく,長期的には宇宙環境も対象とし,人間や生物の能力を超えるロボットの実現を目指しています.ヒューマノイドのような脚型ロボットだけでなく,車輪型や飛行型,それらのハイブリッド型などの移動ロボットを対象としています.ロボットのハードウェア開発はもちろんのこと,ロボット周辺環境の認識,環境認識結果に基づく軌道計画,ロボット全身の運動生成,各種センサ情報を利用した制御器設計などのソフトウェア面の課題にも取り組んでいます.地震や洪水,噴火などの自然災害や老朽化に伴うインフラ事故が相次いで発生していますが,このようなロボットは,災害現場の状況調査・復旧活動などの危険を伴う環境で,人間に代わり作業できることが期待されます.
年間スケジュール
| 2021年3月上旬 | 研究テーマ決定 |
|---|---|
| 2021年6月下旬 | ゼミ生配属,ゼミ生歓迎会 |
| 2021年8月 | 第1回中間発表,研究室合宿 |
| 2021年12月上旬 | M1中間審査会 |
| 2021年12月下旬 | 第2回中間発表,忘年会 |
| 2022年1月中旬 | ゼミ生ロボコン発表会 |
| 2022年2月上旬 | 卒業論文発表 |
| 2022年2月下旬 | 修士論文発表 |
| 2022年3月下旬 | 卒業式 |
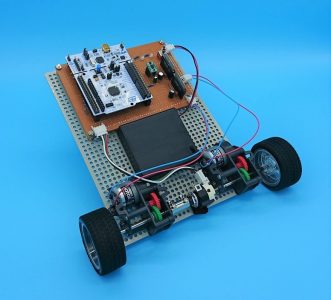
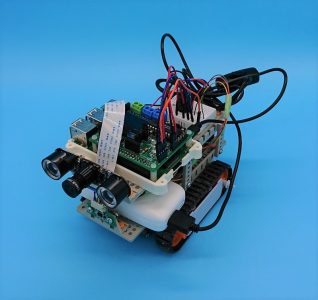
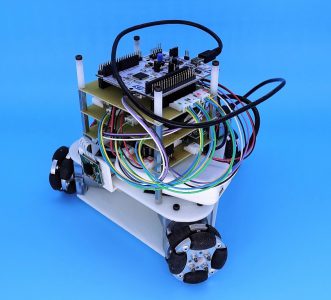
ゼミ生ロボコン発表会(ゼミナール1)
卒業研究では,自らが課題を設定し,その課題に対して能動的に解決方法を検討するとともに研究計画を立案し,研究を遂行しなければなりません.さらに,研究結果を発表で分かりやすく相手に伝えなければなりません.ゼミナール1では,ロボコン発表会を通して卒業研究で必要なプロセスを体験し,技術者に必要な基礎能力を養うことを目的とします.ゼミ生(学部3年生)の作品例を示します.